로봇공학과 - ERICA 공학대학
로봇공학과
Building Maintenance Robot Research Center (BMR Center)
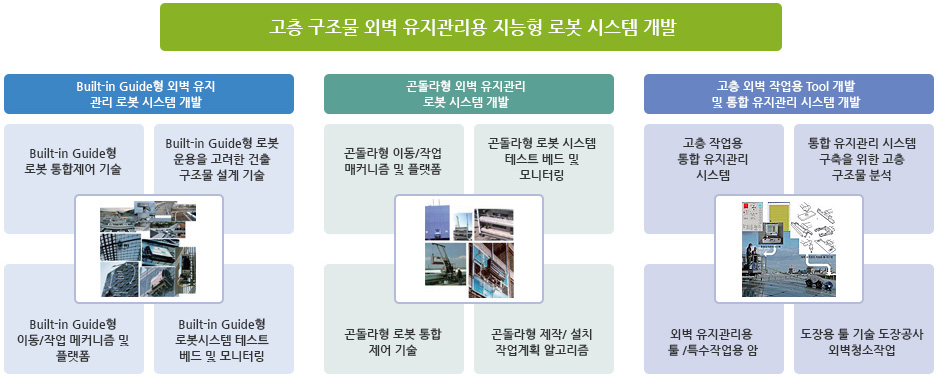
고층 구조물 외벽 유지관리를 목적으로 하는 Built-in Guide 및 곤돌라 타입의 지능형 로봇 시스템을 개발하고, 외벽 청소, 도장과 같은 특수 작업에 적 합한 다목적 Tool을 개발하기 위해 설립되었다.
첨단로봇연구실
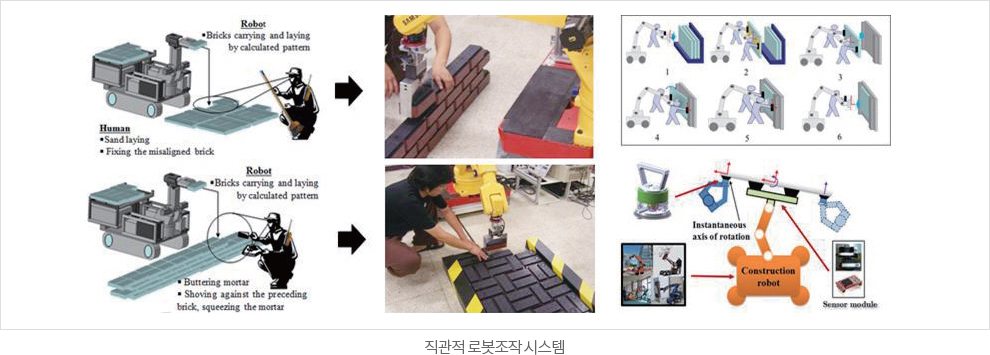
첨단로봇연구실은 사람의 인지능력과 판단력, 로봇 의 정밀함과 큰 힘을 이용하는 인간-로봇 협업과 관련된 다양한 연구를 진행하고 있다. 로봇의 위치 제어 및 힘제어 기술, 사람의 동작의도 기반 근력 증강 및 근력보조기술, 로봇 햅틱 및 원격 조종기 술들이 주요 연구 분야이며 이를 응용하여 착용형 근력증강 로봇, 착용형 재활로봇, 원격 로봇조종 시 스템, 직감적 로봇 조작 시스템 등을 연구 개발 하고 있다.


로봇경로계획연구실
로봇경로계획연구실의 주된 목표는 지능형 로봇이 자율적으로 움직이기 위 한 핵심기술을 연구하는데 있다. 경로계획 혹은 운동계획은 로봇의 시작 및 목표 자세를 장애물과 충돌 없이 연결하는 동작 경로를 생성하는 방법이 다. 이는 2차원 또는 3차원 공간상의 경로뿐만 아니라, 더 높은 차원의 로봇 configuration space에서 경로계획을 의미한다. 예를 들어, 모바일 로봇은 평면에서 2차원 위치 및 방향을, 그리고 로봇 팔 혹은 휴머노이드와 같은 다 관절 로봇은 모든 관절 각도를 생성하는 것이다. 이러한 경로계획 방법은 다 양한 로봇에 적용되어지는데, 그 예시로 최소 회전반경 구속조건을 갖는 모바 일 로봇의 센서 기반 내비게이션, 다관절 로봇 혹은 양팔 로봇의 조작/조립 경 로 계획, 고자유도 모바일 머니퓰레이터의 적응적 운동 계획이 있다.

로봇설계연구실
로봇설계연구실의 연구 분야는 크게 로봇 머니퓰레이터 최적설계 및 설계방 법론 개발, 로봇 시스템의 에너지 효율 최대화를 위한 설계 및 모션 생성, 불 충분 구동 시스템의 설계 및 제어 파라미터 해석으로 나눌 수 있다. 로봇의 기 구적/동적 성능을 해석하여 정량화 시키는 지표를 만들고 이를 기반으로 설 계 파라미터를 최적화하거나 요구사양과 설계 파라미터를 논리적으로 연결하 는 설계방법론, 로봇이 낼 수 있는 최대 출력 대비 큰 가반하중을 다룰 수 있 는 모션 생성 및 에너지 효율 증대를 위한 중력보상장치의 개발, 시스템의 동 적 특성을 최대한 활용하여 효율적인 로봇 시스템 및 모션 제어를 위한 불충 분 구동 시스템의 해석에 대한 연구를 주로 수행하고 있다.

사이버물리시스템 연구실
 |
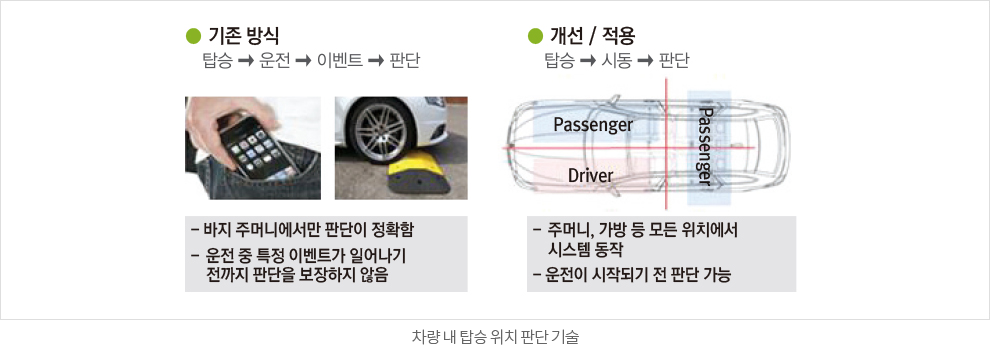
사이버물리시스템연구실에서는 효율성, 정확도, 경제성 등을 위해 사이버 세 계와 물리세계를 밀접하게 연결해줄 수 있는 ICBM(IoT, Cloud, Big Data, Mobile) 기술의 융합과 관련된 연구를 주로 진행한다. 세부 연구주제는 1) 이 기종센서를 이용한 정보 추출 2) 모바일 장비 측위법 3) 스마트홈 개인정보 보안 4) 웨어러블 장비를 이용한 생체 정보 분석 5) 빅데이터 기반의 패턴분석 6) 안전 운전 시스템 7) 지능형 드론 |
|---|